Saucy Paws
The Saucy Paws robots are robot doggies that use an xbox controller for movement and articulation. In the latest festivals, they have been in an arena with velcro balls hanging from pedestals. Players would control the doggies to walk up and push the doggie nose into a ball to pick it up, and then bring it back to the player. Because the robot doggies love to play fetch!
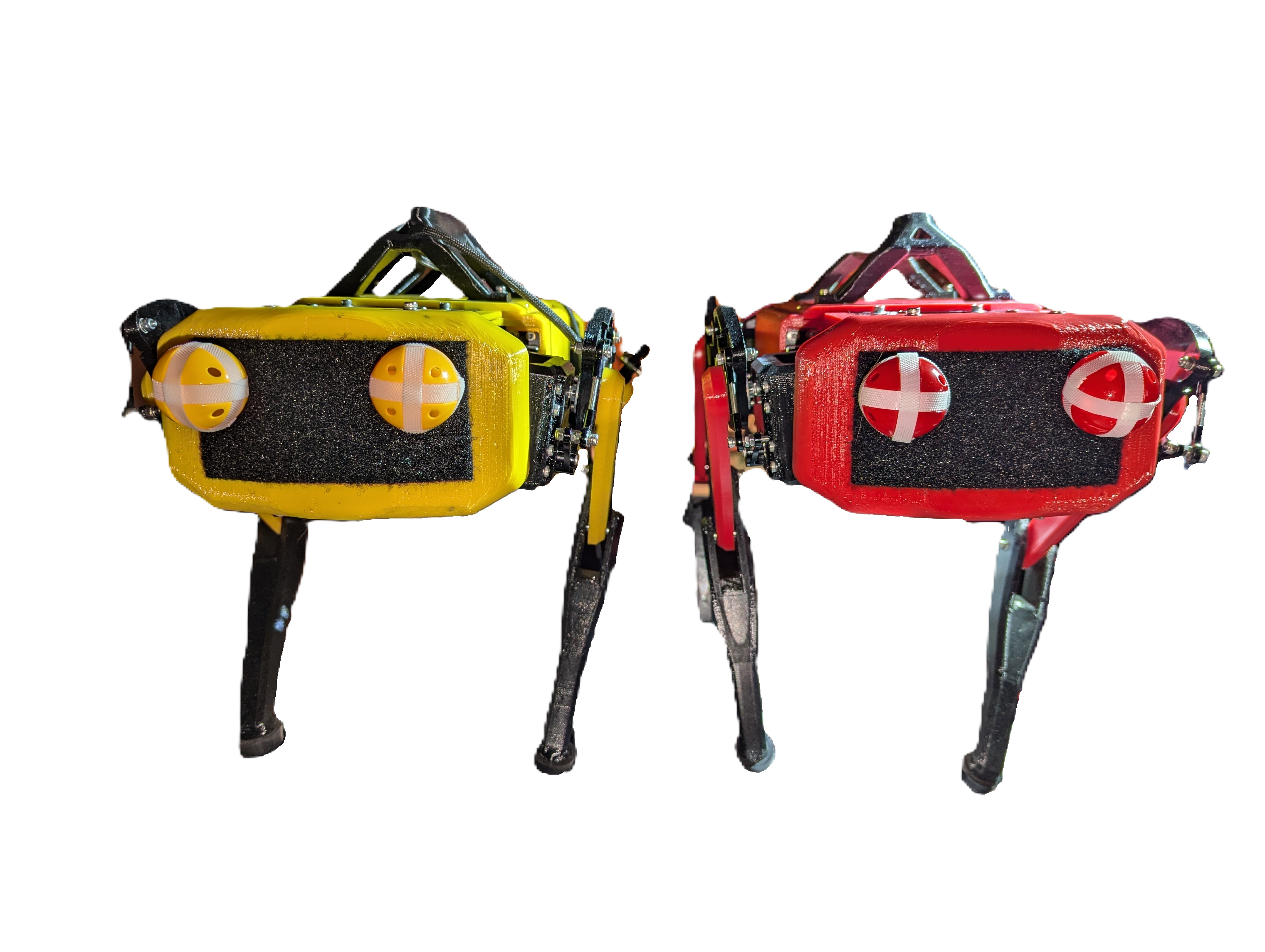
These robots are quadrapeds (robot doggies) based on the Dingo robot at Monash University, which in turn was based on the Stanford Pupper. The plastic frame and panels are 3d printed PETG, with the electronics based on a Raspberry Pi and Arduino Nano. The software is a heavily customized ROS (Robot Operating System) which is used by many university robotics labs.
They are affectionatly known as Ketchup and Mustard, as when they were nearing completion my wife came in and saw their red and yellow colors, and gave them those names! Also, this is also why the project is called Saucy Paws!
There is a provided PDF to explain the build of these quadrapeds in more detail. This was the slide deck used for my speaker session at the CodeMash developer conference.
Materials & Components
- 3D Printed PETG Plastic Frame and Panels
- 12 EcoPower WP250T High Torque Servos (3 per leg)
- Yowoo Graphene Battery 4000mAh 100C 4S 14.8V
- Raspberry Pi 4 8GB Running Debian and ROS
- Arduino Nano (Voltage and E-Stop Sensors)
- Custom PDB curcuit board
- UCTRONICS Lipo to DC 5V 5A Buck Converter (Electronics)
- ACEIRMC 20A Step Down Module DC 6-40V (Servos)
- HCDC RPI GPIO Terminal Block
- XBOX 360 Controller